ACTUADOR DE CODO (FLEXIÓN)
Materiales
• Cuerpo
- Dragon Skin 30
- Nylon (hilo de pescar)
- Fibra de vidrio (Lámina limitadora de tensión)
• Skin
- Ecoflex 0030
- Componentes: sil-poxy

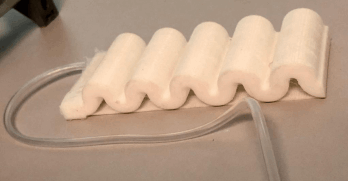
Este módulo permite la flexión del codo, por presión neumática. Está conformado por dos actuadores de codo, uno hecho de Dragon Skin 30 y el otro por un sistema inflable. El primero permite la flexión del codo y, el segundo la extensión. Ambos se activa mediante un compresor de aire que genera una presión neumática, la cual será controlada por una válvula.
ACTUADOR DE CODO (FLEXIÓN)
Materiales
• Cuerpo
- Dragon Skin 30
- Nylon (hilo de pescar)
- Fibra de vidrio (Lámina limitadora de tensión)
• Skin
- Ecoflex 0030
- Componentes: sil-poxy
ACTUADOR DE CODO (EXTENSIÓN)
Materiales
- Lámina de nylon (20 x 5 cm)
- Rosca M6

Materiales:
• Cuerpo
- Flex
- Tubo de plástico
- Velcro
- Tela de nylon
Este módulo consta de un guante que unido a 2 imanes, uno en la palma de la mano y el otro en el dedo pulgar, permitirá hacer un movimiento de pinza inducido por los imanes. Este guante apoyado de objetos acondicionados, permitirán al usuario volver a realizar algunas actividades cotidianas asociadas al agarre de la mano, y con ello otorgarle cierto grado de independencia.
Materiales
- Guante de algodón
- Tela de nylon
- Velcro
- Imán (diametro de 2cm)

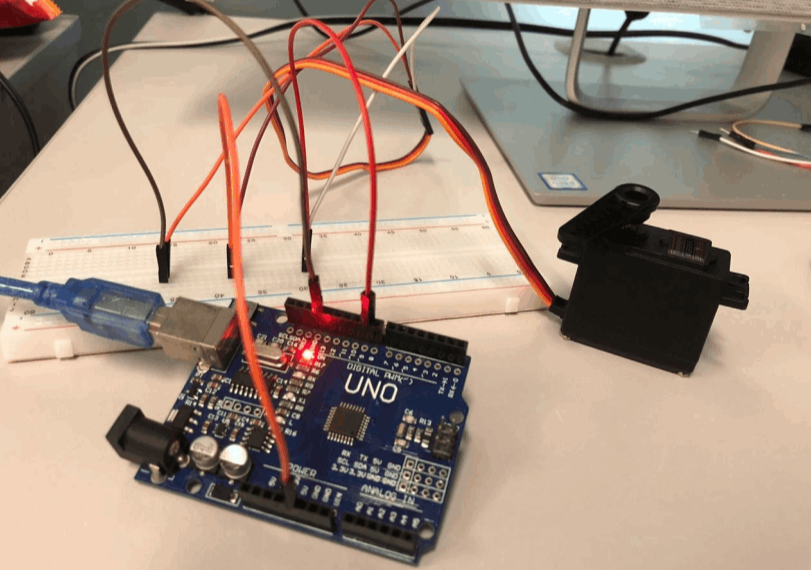
Este módulo servirá de apoyo para el módulo de flexión del codo y al de la mano. El servomotor acciona los actuadores a través de cuerdas de nylon, las cuales jala para lograr la extensión de la muñeca y flexión del codo.
Materiales
- Arduino uno R3
- Cables
- Servomotor MG995
- Protoboard