El exoesqueleto integral de extremidades superiores es un dispositivo que consta de dos partes, la primera es un mecanismo electrónico que le permite al paciente mover el codo y el hombro mediante un sistema de módulos blandos activados por una válvula de presión (mecanismo neumático). [1]
La segunda parte es un modelo integrado en la muñeca que permite realizar movimientos de flexión y extensión de la mano; para dicho modelo se idearon 3 conceptos que utilizan diferentes métodos de activación.
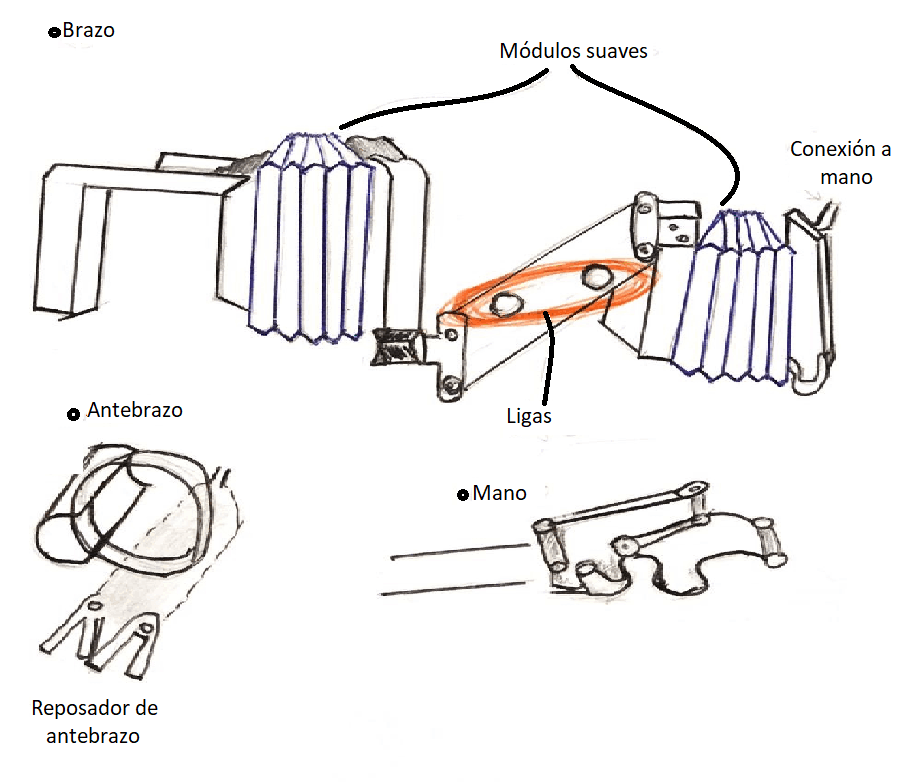
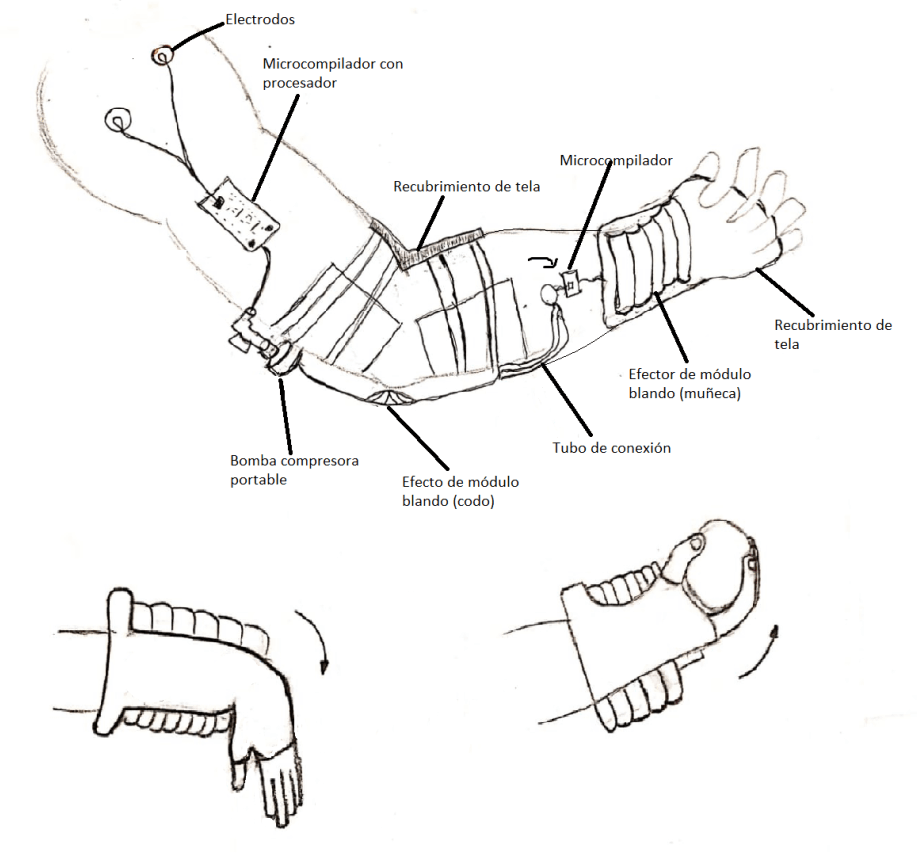
Exoesqueleto de extremidades superiores con mecanismo neumático y efecto tenodesis.
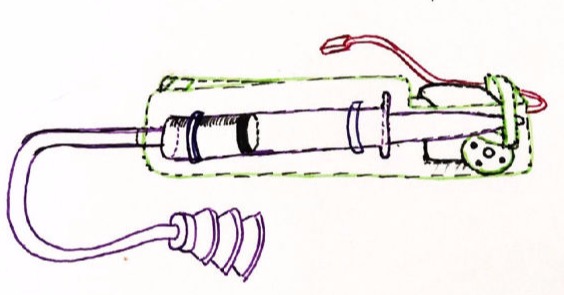
Este concepto se basa en un sistema de movimiento neumático impulsado por un compresor y una cámara de vacío. Dicho sistema le otorga control voluntario del movimiento del codo al paciente, mediante un sensor de EMG ubicado en la zona con impulso nervioso residual más cercana. La señal es enviada al microprocesador, el cual transforma la señal para que sea asimilable por el microcompilador. Luego, dicha señal es transmitida hacia los actuadores, que en este caso son las válvulas reguladoras de presión. De esta manera, el paciente podrá controlar a voluntad el movimiento de la articulación.
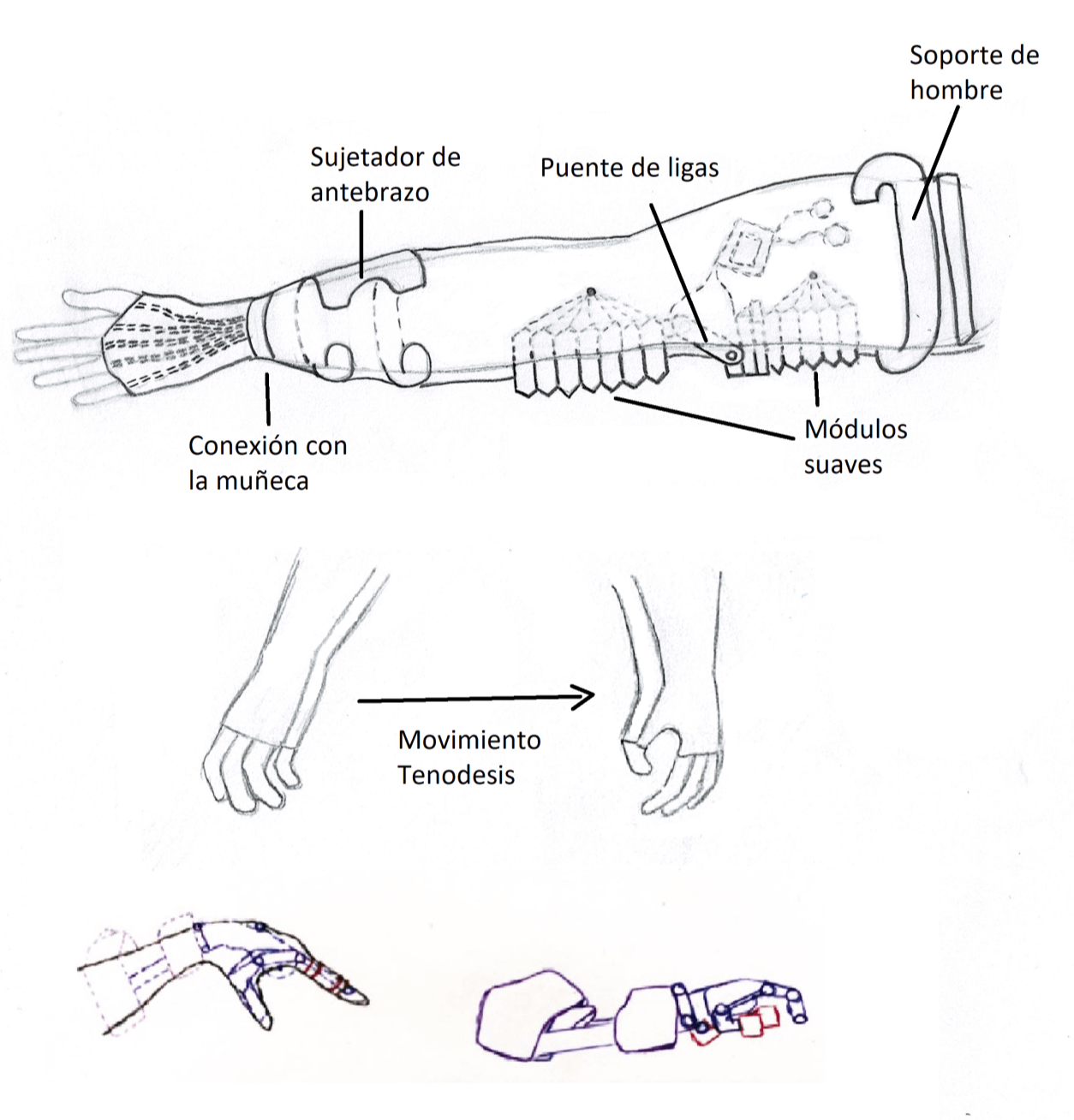
El movimiento de la muñeca se llevará a cabo como consecuencia del movimiento del codo. Para ello, se usa el mecanismo conocido como “Tenodesis”, el cual consiste en aprovechar la tensión que se genera en el tendón al bajar el brazo para flexionar y contraer levemente los dedos.
La órtesis funciona con un mecanismo de tensión que devuelve la mano a su posición inicial luego de que la muñeca se contrae por acción de la gravedad.
Para elevar la mano se hará uso del exoesqueleto, el cual al extender el codo y bajarlo, activará el sistema de la muñeca extendiendo los dedos. [2]
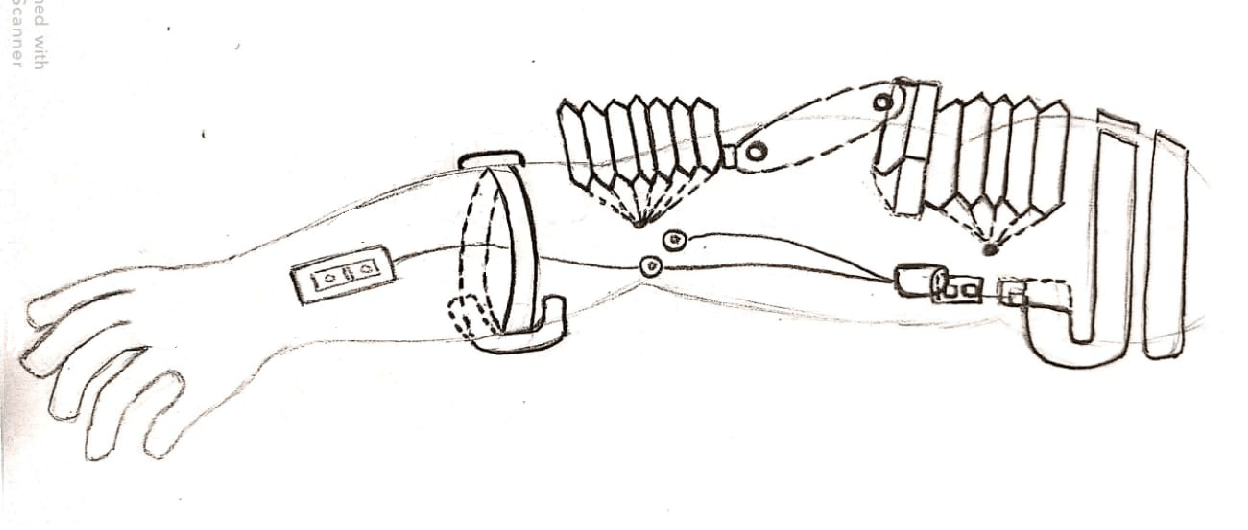
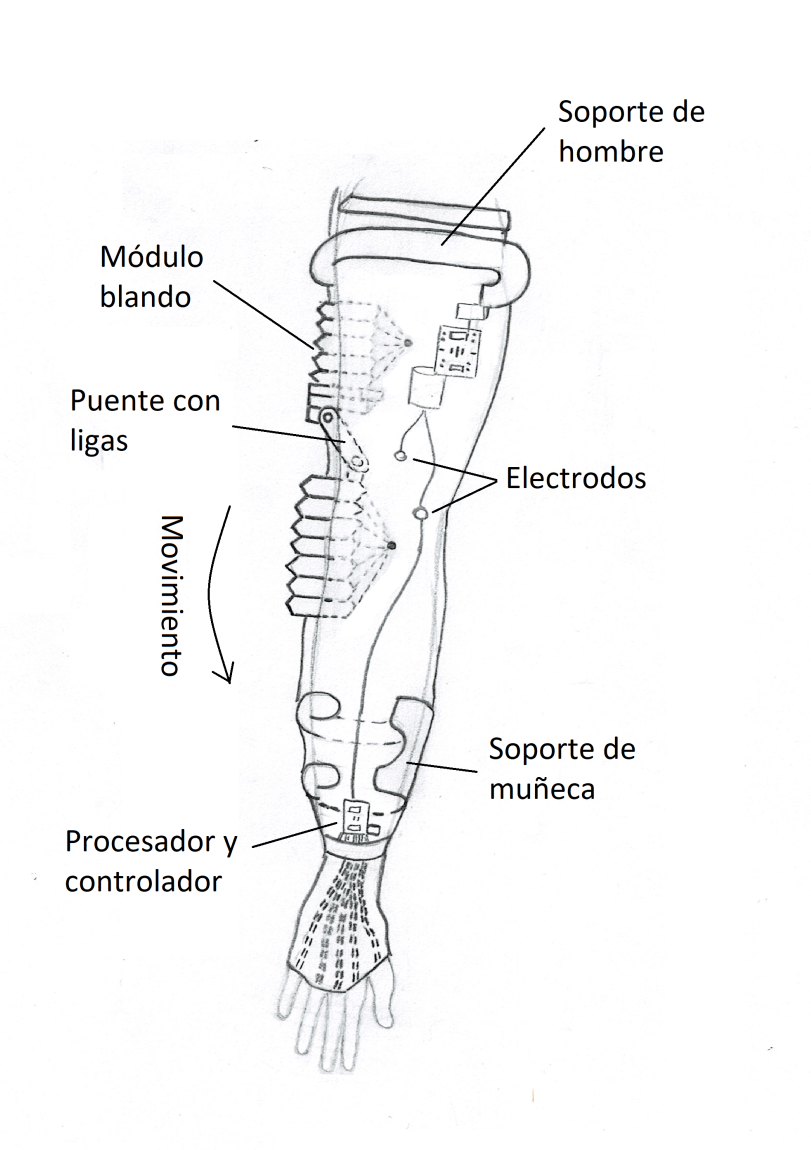
Exoesqueleto de extremidades superiores de módulos blandos impulsado por sistemas neumáticos
Este concepto consta de un sistema completamente neumático, impulsado por una fuente de presión portable. Le permite al paciente controlar el movimiento del codo, mediante un sensor de EMG ubicado en la zona residual con mayor cercanía. Dicha señal es enviada al microcontrolador Arduino UNO, el cual se encontrará programado para emitir la orden a la válvula. De esta forma, el individuo podrá regular la presión y controlar el movimiento de la articulación. [3]
De forma análoga, este dispositivo también podrá controlar el movimiento de la muñeca, usando el mismo sistema de procesamiento que para el codo. El sensor EMG esta vez se ubicará en la zona más cercana a la muñeca que registre la señal. [4]
El objetivo es lograr que el paciente pueda ampliar su rango de movimiento para poder realizar ejercicios de rehabilitación que lo ayuden disminuir el acortamiento muscular. Al mismo tiempo, se espera que con el entrenamiento adecuado, el paciente pueda volver a realizar algunas actividades diarias por su cuenta.
Exoesqueleto accionado por presión e impulso eléctrico.
Este concepto, además del sensor de EMG para el encendido y apagado del exoesqueleto de brazo y codo, hace uso de la técnica de estimulación eléctrica funcional (FES), la cual utiliza pulsos eléctricos de baja energía para generar artificialmente movimientos corporales la para estimular el movimiento de apertura y cierre de la mano. El nivel de corriente que se utilizará para la apertura de la mano será de aproximadamente 18.07mA, con una variación entre 4.54mA a 26mA [5]. Asimismo, para el cierre de la mano se empleará un nivel de corriente de 17.62mA, con un mínimo de 4.54mA y máximo de 26mA. El objetivo con esta idea es detectar las señales mioeléctricas de la muñeca y estimular la apertura o cierre de la mano de acuerdo al tipo de señal recibida, de este modo se realizará el ejercicio básico para prevenir complicaciones en los tendones y músculos de la mano.
Bibliografía:
1. Oguntosin V. Design and Validation of Exoskeleton Actuated by Soft Modules toward Neurorehabilitation—Vision-Based Control for Precise Reaching Motion of Upper Limb [Internet]. 2017. Available from: https://www.frontiersin.org/articles/10.3389/fnins.2017.00352/full
2. Portnova A. Design of a 3D-printed, open-source wristdriven orthosis for individuals with spinal cord injury. [Internet]. 2018. Available from: https://journals.plos.org/plosone/article/file?id=10.1371/journal.pone.0193106&type=printable
3. Hui Koh T. Design of a Soft Robotic Elbow Sleeve with Passive and Intent-Controlled Actuation [Internet]. 1st ed. Frontiers in Neuroscience; 2017 [cited 26 September 2019]. Available from: https://www.frontiersin.org/articles/10.3389/fnins.2017.00597/full
4. Ang B, Yeow C. Design and Characterization of a 3D Printed Soft Robotic Wrist Sleeve with 2 DoF for Stroke Rehabilitation. 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft) [Internet]. 2019 [cited 6 October 2019];. Available from: https://ieeexplore.ieee.org/abstract/document/8722771
5. Delgado F. J. Electrodos para la Rehabilitación de Hemiplejías [Internet]. 1st ed. 2019 [cited 26 September 2019]. Available from: http://www.laccei.org/LACCEI2005-Cartagena/Papers/BI050_DelgadoSaa.pdf