Referencias:
1. Tubbs J, Pound D. Atlas of Orthoses and Assistive Devices : Upper Limb Orthoses for Persons With Spinal Cord Injuries and Brachial Plexus Injuries (5ta ed.). 2019.
2. Bioness Inc. Bioness Live On. Obtenido de Bioness H200 Wireless Hand Rehabilitation System Overview [Internet]. 2019. Available from: http://www.bioness.com/NewsMedia/Media_Gallery/H200/Bioness_H200_Wireless_Hand_Rehabilitation_System_Overview.php
3. ResearchGate [Internet]. Not published [cited 13 September 2019];. Available from: https://www.researchgate.net/publication/6181730_Orthotic_aided_training_of_the_paretic_upper_limb_in_chronic_stroke_Results_of_a_phase_1_trial.
4. Kang Y, Lee Y, Park H. Biomechanical evaluation of wrist-driven flexor hinge orthosis in persons with spinal cord injury. [Internet]. 2013. Available from: https://pdfs.semanticscholar.org/b266/0854782e3e8a200e4cad4ed1fad260f84e1c.pdf
5. Rolyan Individual Units for Flexion and Extension [Internet]. 2019. Available from: https://www.performancehealth.com/rolyan-individual-units-flexion-extension
6. PATTERSON MEDICAL. Saebo Reach [Internet]. Australia; 2015. Available from: https://www.saebo.com/saeboflex-saeboreach-details/
Bibliografìa:
1. Avenano J, A. Basco J. Electroestimulación funcional en el lesionado medular. [Internet]. 2017 [cited 10 September 2019];. Available from: https://www.researchgate.net/profile/Juan_Avendano- Coy/publication/257057979_Electroestimulacion_funcional_en_el_lesionado_medular_revision_cientifica/links/5af9498aaca2720af9eecd8f/Electroestimulacion-funcional-en-el-lesionado-medular-revision-cientifica.pdf.
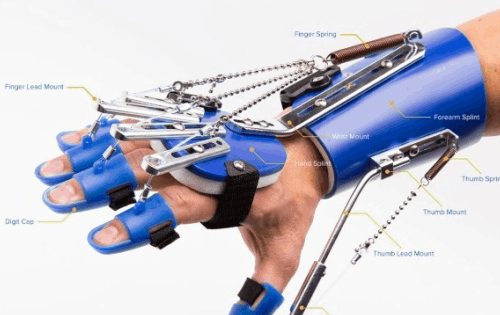
2.Portnova A. Design of a 3D-printed, open-source wristdriven orthosis for individuals with spinal cord injury. [Internet]. 2018. Available from: https://journals.plos.org/plosone/article/file?id=10.1371/journal.pone.0193106&type=printable
3. Oguntosin V. Design and Validation of Exoskeleton Actuated by Soft Modules toward Neurorehabilitation—Vision-Based Control for Precise Reaching Motion of Upper Limb [Internet]. 2017. Available from: https://www.frontiersin.org/articles/10.3389/fnins.2017.00352/full
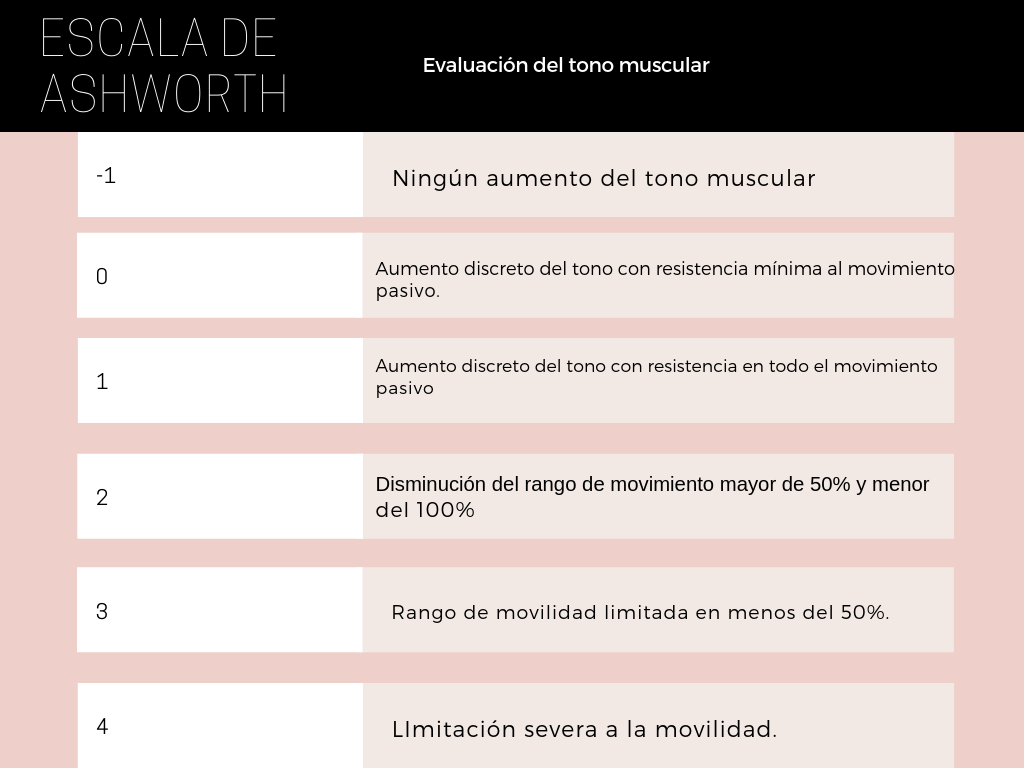
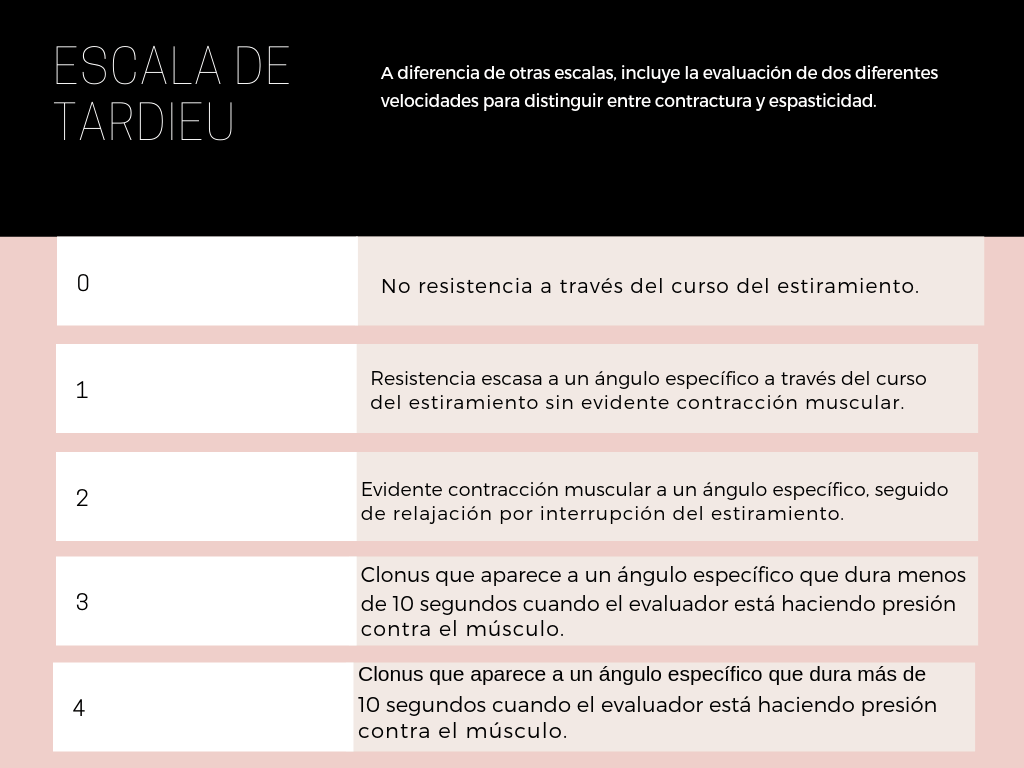
4. Espasticidad en adultos. (2019). Revista Mexicana de Neurociencia. [online] Available at: https://www.medigraphic.com/pdfs/revmexneu/rmn-2009/rmn092i.pdf [Accessed 17 Sep. 2019].